- Nov 2025: 🚀 Started my new position as a Postdoc at NTU!
- Jul 2025: 🎉 FORESEER has been accepted by The International Journal of Robotics Research!
- Jun 2025: 😊 Passed my PhD doctoral dissertation defense!
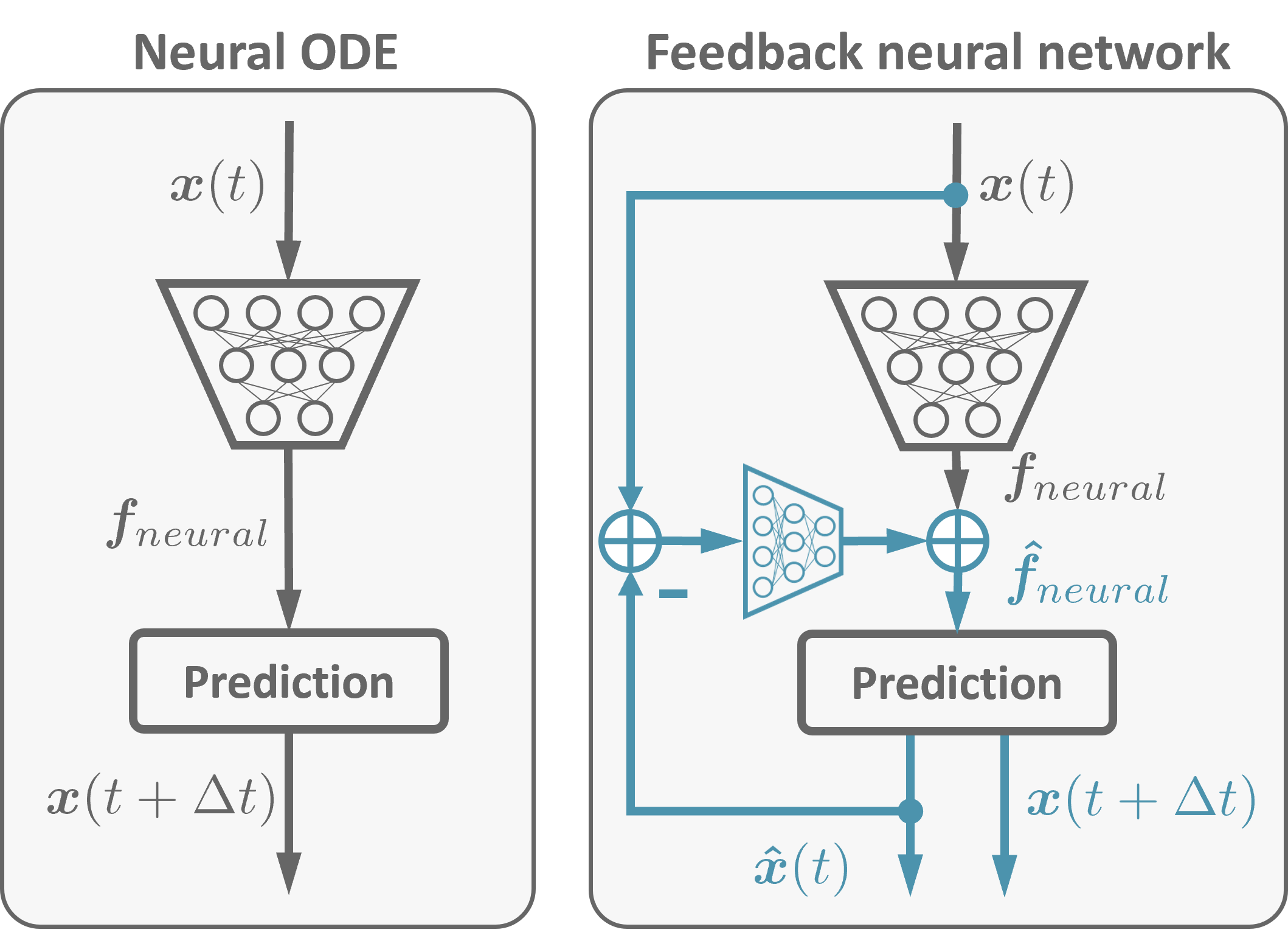
- Feb 2025: 🎉 Feedback neural network has been selected as an oral paper by 2025 ICLR (top 1.8%)!
Hello, I'm Jindou Jia
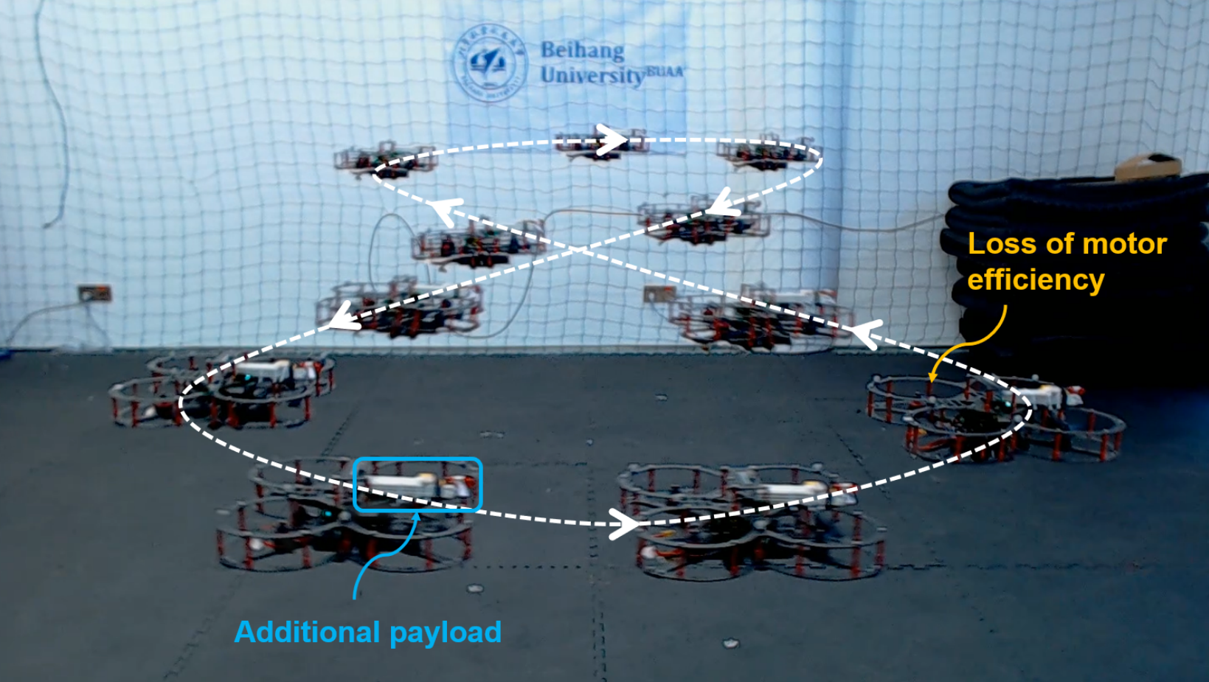
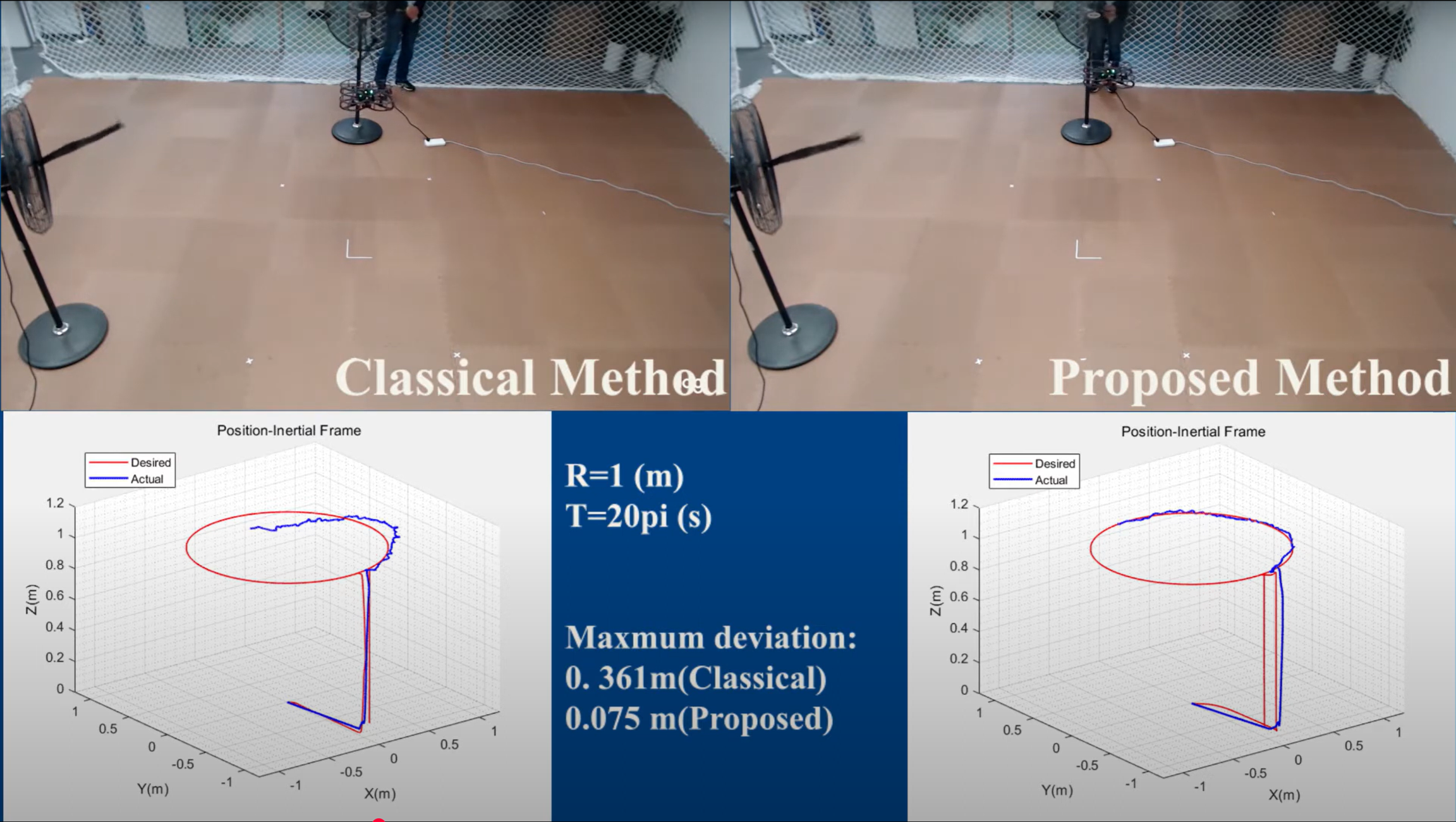
I am a postdoc in the School of Mechanical and Aerospace Engineering at Nanyang Technological University (NTU), working with Prof. Jianfei Yang at the MARS Lab. I completed my Ph.D. in 2025 from the School of Automation Science and Electrical Engineering and Shenyuan Honors College, Beihang University, China. I was supervised by Prof. Lei Guo, Prof. Xiang Yu, and Prof. Kexin Guo. Robots deployed in the real world inevitably face uncertainties caused by internal model mismatch and external unmeasured disturbances. The topic of my research is learning and predicting uncertainties, aiming at enabling robots to generalize diverse unseen environments.